音をモニタリングする大枠のプログラム(NagoRobo_Main.py)の実際の機能部分のクラス(BrainAction.py)を作成します。
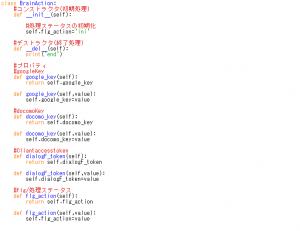
1)今までに作成した機能をImportします。また、利用するうえでの初期処理/終了処理及びAPIを利用するうえでのキー情報を格納するプロパティを定義します。
※RaspberryPi Zeroは、Googleのライブラリが使用できないのでコメントアウトしてあります。

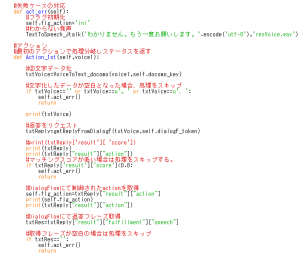
2)最初のアクションを行う機能を作成します。

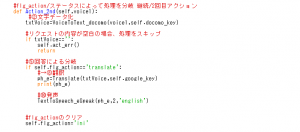
3)継続アクションを行う機能を作成します。
※作成できたら、NagoRobo_Main.pyを起動/実行して実際に動かしてみましょう。例えば、「青森県の天気は?」と聞いて、天気が返ってきたらOKです。
※あとは、いろいろな会話のシナリオを充実させたり、できる機能を増やすことで自然で高機能な頭脳になっていくことになります。今後、機能を充実させていく対応は別セッションにて実施します。