手を動かすためにサーボモーターを使います。
各部品はブレッドボードとジャンパー線を利用して接続します。
両手を動かすイメージで2つのサーボモーターを制御します。
用意するものとして
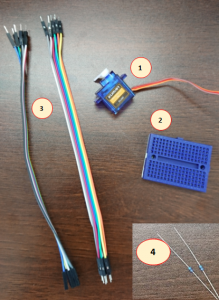
①サーボモータ(SG90) 2個(両腕)
②ブレッドボード
③ジャンパー線 数本
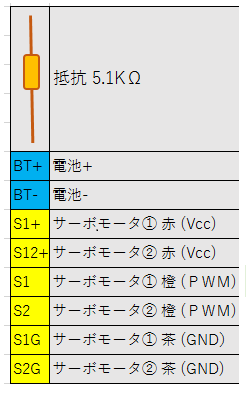
④抵抗 5.1kΩ 2個
⑤サーボモータ用電池(単三) 4本 及び電池ケース(写真無し)
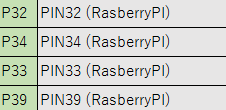
1)Raspberry Pi、ブレッドボードにジャンパー線を接続します。
【Raspberry Pi側】
ジャンパー線を下図の通りに接続します。
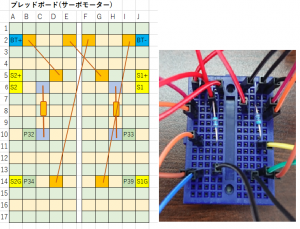
[ブレッドボード側]
ジャンパー線と抵抗を下図の通りに接続します。
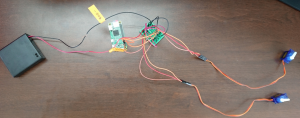
2)各パーツとブレッドボードを接続する
①Raspberry pi
②ブレッドボード
②サーボモータ
④電池
①~④の各パーツをブレッドボードを中心として接続してください。

各パーツを接続するとこのようになります。