Raspberry Piからサーボモータを制御できるようになりましたのでこのプログラムをBrainAction.pyに組み込みます。
1)Dialogflowの修正
①Entities/action_selfの追加
動きを制御するEntityとして、腕の各操作のEntityを登録します。

②Intents/Action_Selfへのフレーズの追加
Training phrases を追加します。

手の動きの指示は赤枠の部分となります。5.3.2.2.の章で先に登録している場合は、この部分は飛ばしてください。
これでDialogflowの修正が完了しました。
2)BrainAction.pyの修正
Dialogflowの修正に伴い、プログラムの修正を行います。
①サーボモータ制御のプログラムを利用できるように、servo.pyのインポート処理を追加します。

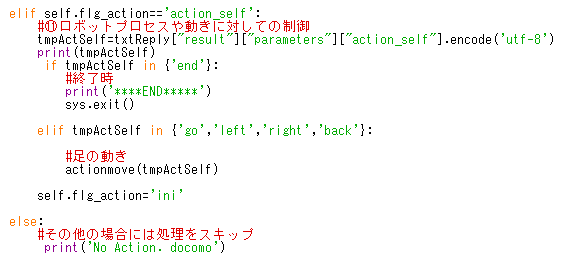
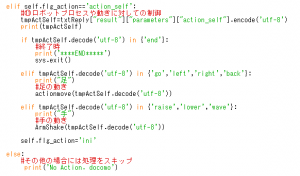
②BrainAction.pyの下記の部分を修正します。
【修正前】
【修正後】
NagoRobo_Main.pyを動かし、「下げてください」「上げてください」「振ってください」などのDialogflowに登録しているフレーズを言って、「了解しました。」とロボットが発声し、サーボモータが動いていることが確認できればOKです。