ロボットの基本的な機能ができてきたので、今までに作成してきた機能(目、耳、口、足、手)をつなぎ合わせて、実際にロボットを作成してみます。ここで作成するロボットが完成形というわけではありませんが、全ての機能を組み合わせて問題なくロボットが動くか確かめます。
[ロボットの胴体をつくる]
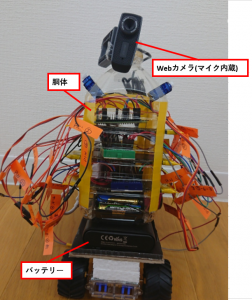
ロボットの胴体の中にRaspberry Pi、ブレッドボード、電池等をセットしていきます。今回は胴体の材料に1㍑のペットボトルと段ボールを使って作成しました。胴体は同じように作成する必要はありませんが、足を作るの章で作成した足の台に載せる事の出来る大きさで、なるべく軽い素材で作るようにしてください。


[胴体に頭脳をセットする]
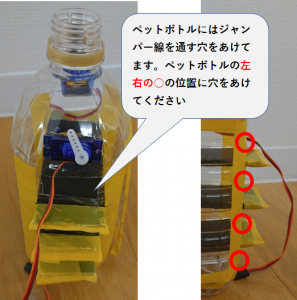
1)下記の図の通りにRaspberryPi、DCモーターのブレッドボード、サーボモータのブレッドボード、電池、サーボモータをセットしていきます。また、セットする際にジャンパー線をペットボトルにあけた穴に通します。
※ジャンパー線を通すときにDCモーター①と②、サーボモータ①、②のジャンパー線を左右で分けて通すようにします。
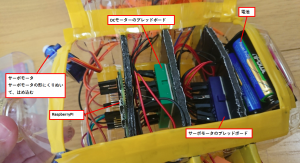
全てペットボトルの胴体に詰め込むと下記の図のような形になります。

2)次にジャンパー線をつなぎます。ブレッドボード側のジャンパー線とRaspberryPi側のジャンパー線をつなぎます。シールで目印をつけているので差し込み先を確認せずとも接続できます。
※DCモーターへつなぐジャンパー線は足へセットする際に接続してください。
電池はDCモーターとサーボモータで共有して使っています。各ブレッドボードの電池へつなげるジャンパー線を電池の線に下記の図の用に接続します。
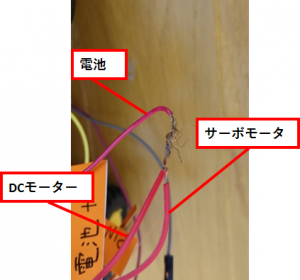
電池の線にDCモーター、サーボーモータの両方の線が接続された状態です。
[ロボットを組み立てる]
ロボットの足に各パーツを載せていきます。足に胴体を載せたらDCモーターとDCモーターのブレッドボードから出ているジャンパー線を接続してください。
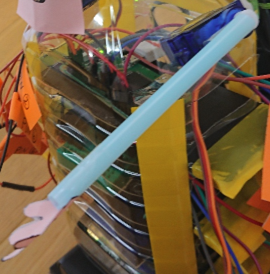
サーボモータには腕と分かるようにストローをセットしました。
後は、スピーカーをRaspberryPiにセットすれば完了です。

正面から見るとこんな感じ
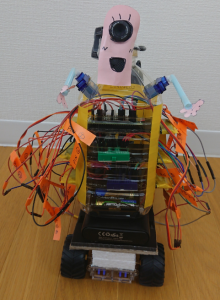
雰囲気を出すために顔を付けてみました。
プロトタイプ、第1弾はこんな感じです。
後は、RaspberryPiの電源を入れて動作確認してみましょう。
NagoRobo_Main.pyを起動し、喋る、移動するができれば成功です。
前の投稿/次の投稿/メニューページへ戻る