Raspberry piを起動した際にロボットのプログラム自動的に起動することができると便利なので、その設定を行います。
手順としては
1)ロボットのプログラム(NagoRobo_Main.py)がどのフォルダからでも起動できるように、プログラム内部でフォルダを参照してデータを取得している部分を、動的にファイルの場所を取得できるように修正します。
2)自動起動の設定を行う。設定内容としては、ターミナルを起動しNagoRobo_Main.pyをパス付で実行する。
では、順番に対応します。
1)プログラム内部のフォルダ内にあるファイルのパスを動的に取得するように変更。
変更対象のファイルは下記の4つです。
keylist.json
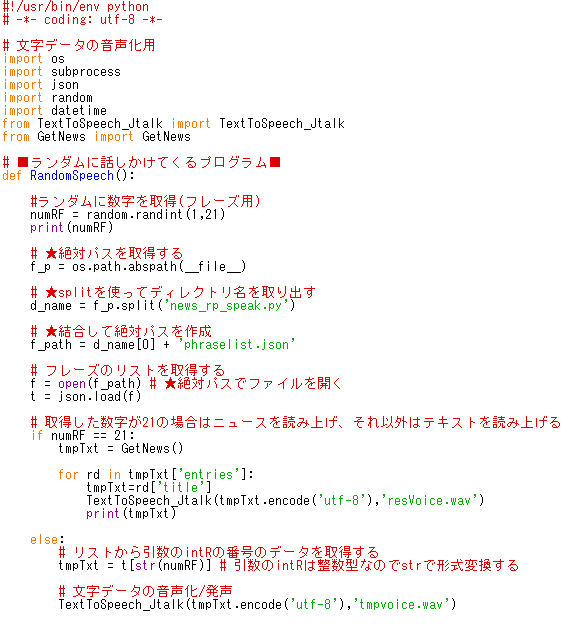
phraselist.json
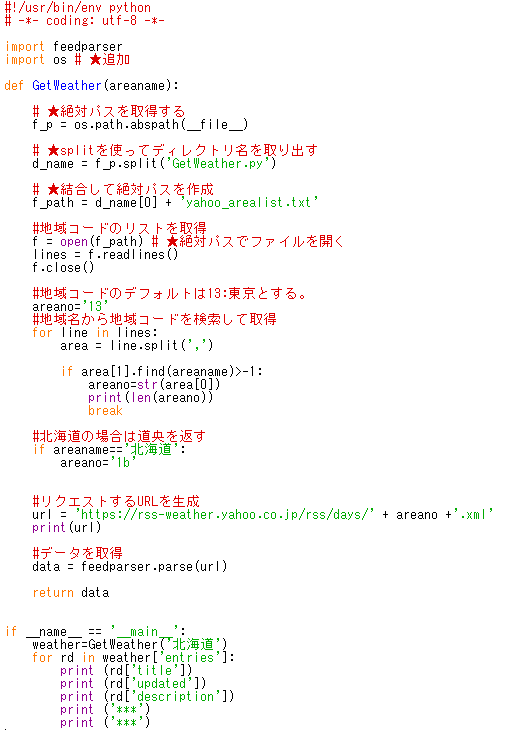
yahoo_arealist.txt
RobotNago-〇〇〇〇.json(googlekeyファイル)
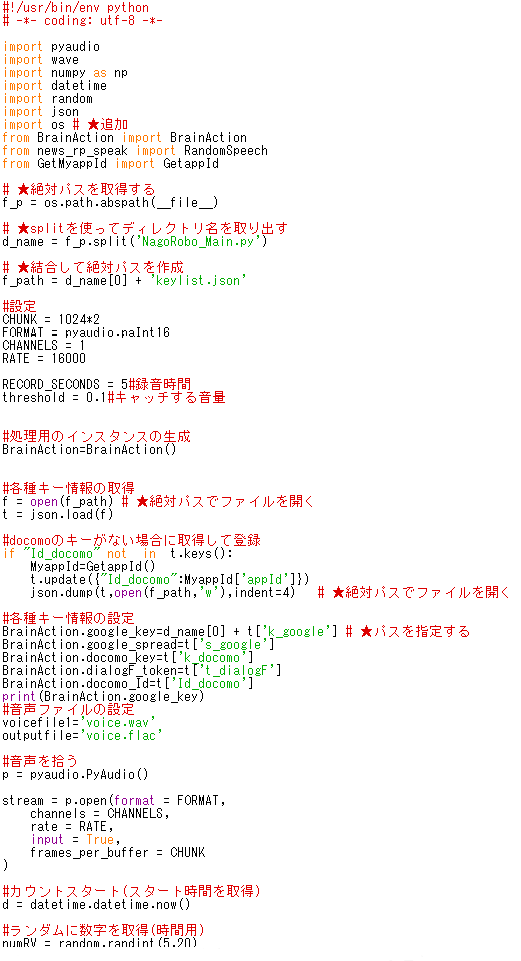
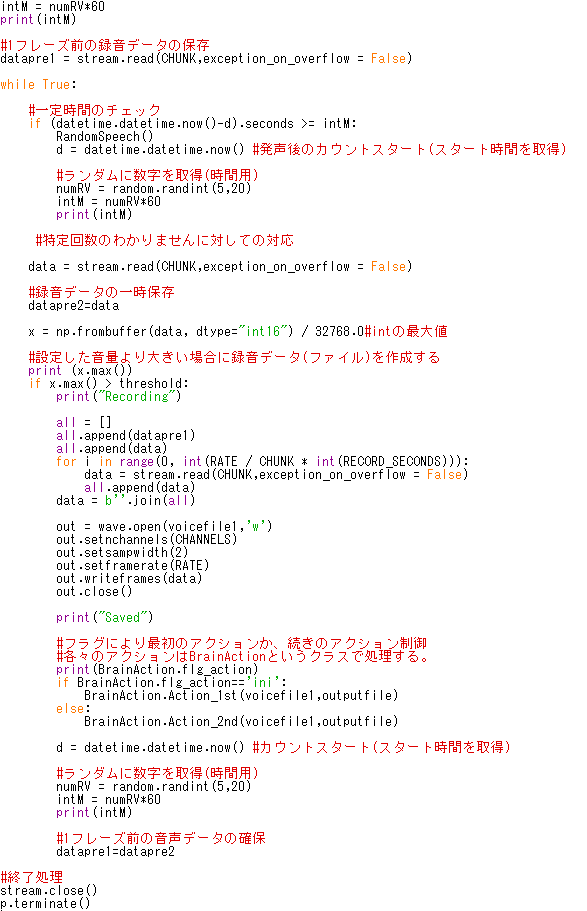
[NagoRobo_Main.py]を修正します。
# ★と記載されている部分を追加/修正します。
keylist.jsonとRobotNago-〇○○○.jsonをパスを指定して参照するように修正します。
yahoo_arealist.txtをパスを指定して参照するように修正します。
phraselist.jsonをパスを指定して参照するように修正します。
2)自動起動用の設定を行います。
①cd ~/.config/lxsession/LXDE-piで、フォルダーを移動します。
④「sudo nano autostart」でファイルを開きます。
⑤「autostart」ファイルの中に下記を追記して保存します。
@lxterminal -e sudo python3 /home/pi/Python3/NagoRobo_Main.py
再起動し、自動でターミナルが起動され、NagoRobo_Main.pyが実行できていたらOKです。