サーボモーターはpwmという信号を利用して動いています。
現在は、モノラルのスピーカーをD級アンプを利用して直接Raspberry pi に接続し、このpwmという信号を利用しています。しかし、サーボモーターとスピーカーを同時に利用すると競合が発生し動作不具合が発生するようです。このため、今回はサーボモーターの競合を解消するために、別回路(部品)を利用して動かします。また、このことにより、Raspberry piのpwm信号のピン数が限定的であったことから、サーボモータの接続にも限界がありましたが、この数の制限の解消も目的としています。
今回は、PCA9685というサーボモータードライバを利用します。
1)Raspberry Pi、PCA9685の配線
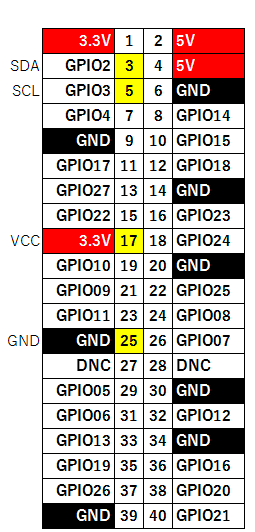
ジャンパー線を下図の通りに接続します。
[Raspberry Pi側]
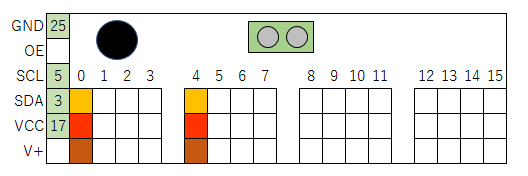
[PCA9685側]
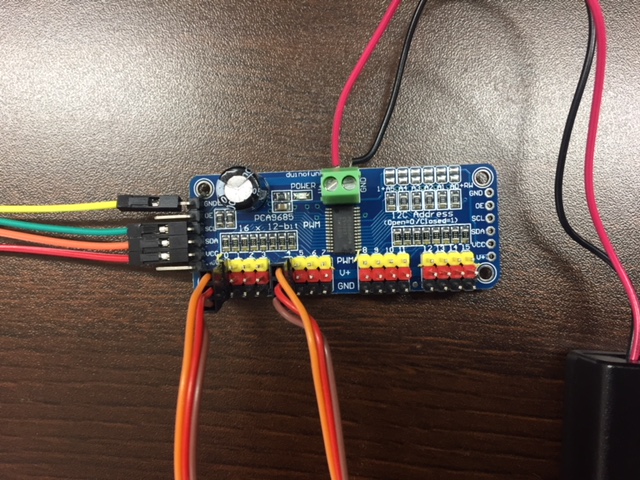
電池(単三電池4本が入った電池ケース)を画像のように接続します。
GND側➡マイナス(黒) V+側➡プラス(赤)
2)ライブラリのインストール
sudo pip3 install adafruit-pca9685
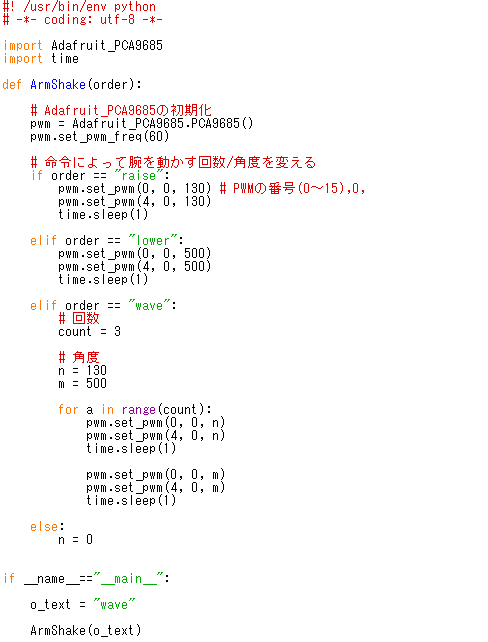
3)プログラムの作成と修正
新しく「servo_new.py」を作成し、「BrainAction.py」を修正します。

NagoRobo_Main.pyを実行し、サーボモーターの稼働とスピーカーの正常稼働確認ができれば完成です。