前回の章で音声でDCモーターを操作するプログラムが完成しました。今回はDCモーターにギアを取り付けて実際に走らせます。
1)ギアを組み立てる
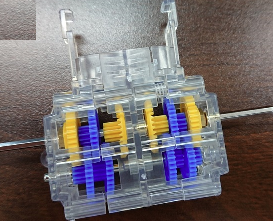
使用するギアは5.3.2で紹介した「タミヤ ダブルギア」を使います。
※ギア比が1番大きいDタイプを組み立てました。ギア比が大きければスピードは落ちますが、重いものを運ぶことができます
※組み立て方法は説明書で確認してください。
2)RasberryPiやブレッドボードなどを載せる台を作る
※ギアと取り付ける台の作成方法は同じでなくても大丈夫です。(参考までに2枚の段ボール(22㎝×10㎝)と発泡スチロール(10㎝×5㎝)を使用しました。)
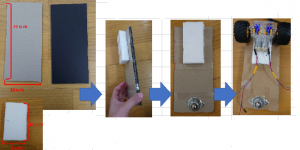
3)すべての部品を接続して組み立てる
上記まで作成した足となるギアや土台と頭脳となるrasberryPiとブレッドボードを載せての動作テストを行います。(スピーカー、Webカメラ、バッテリー(RaspberryPiの電源)、電池などすべて載せてください。)
全てのパーツを足に載せたら前章でDCモーターを音声で動かした時のようにジャンパー線の接続を行ってください。

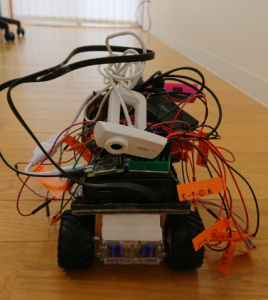
前から見ると上記のような形になります。
4)動作テスト
では、NagoRobo_Main.pyのプログラムを実行し、発声にてロボットを動かしてみてください。