Raspberry piからモーターを制御できるようになりましたので、このプログラムをBrainAction.pyに組み込みます。
1)Dialogflowの修正
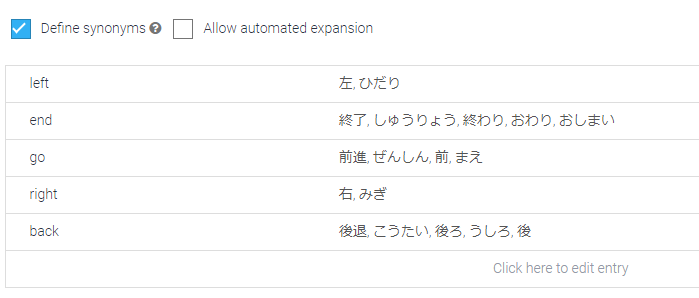
①Entities/action_selfの追加
動きを制御するEntityとして前後/左右のEntityを登録します。
このEntityはIntentに登録した際に利用し、動きを制御するキーワードとしてプログラムで利用することから、取り扱いしやすいように英語表記で登録します。synonymsは日本語を含めて通常通り登録しておきます。
②Intents/Action_selfへのフレーズの追加
~Training phrasesを追加します。
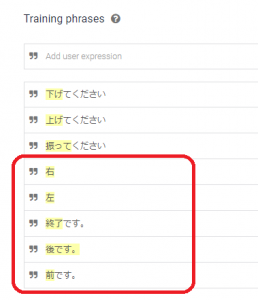
足の動きの指示は赤枠の部分となります。「下げてください」、「上げてください」、「振ってください」は手の動きとなります。手を作るの章でプログラムを作成しますが、先に登録していても問題ありません。
~Response登録します。
正常にフレーズが認識された場合には、「了解しました。」と返すようにします。
2)BrainAction.pyの修正
Dialogflowの修正に伴い、プログラムの修正を行います。
①モーター制御のプログラムを利用できるように、motor_drv.pyのインポート処理を追加します。

➁BrainAction.pyの下記の部分を修正します。(仮置きしていたプログラムを今回のDialogflowの登録に合わせて修正しています。)
【修正前】
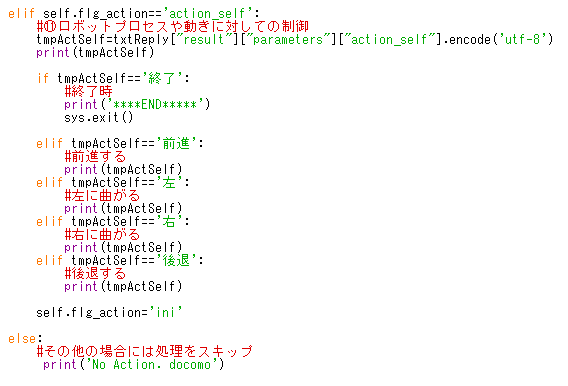
【修正後】
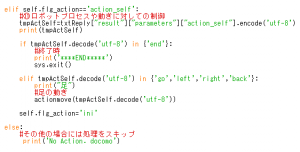
NagoRobo_Main.pyを動かし、「前進」「右」「左」などのDialogflowに登録しているフレーズを言って、「了解しました。」とロボットが発声し、モーターが動いていることが確認できればOKです。