ロボットの足となる、基本的な機能を作成します。
ロボットの足のはDCモータとタイヤで実現し、そのタイヤを操作するプログラムを作成します。最終的には音声で前進、後退、左、右へ移動できるようにします。
1.DCモーターを動かす
2.motor_drv.pyをBrainAction.pyへ組み込む
3.足の部品を組み立てて動かす
事前に下記の材料を用意してください。
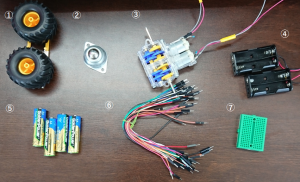

①タイヤ(前輪用)
②後輪
③ギア(タミヤ ダブルギアボックス/DCモーター(FA-130RA-2270) 付)
④乾電池ボックス
⑤単3電池 4本
⑥ジャンパー線
⑦ブレッドボード
⑧セラミックコンデンサー0.1μF50V2.54mm 2個
⑨抵抗 5.1KΩ 2個
⑩バッテリー(5V/2A)
⑪モータードライバ(TA7291P) 2個